|
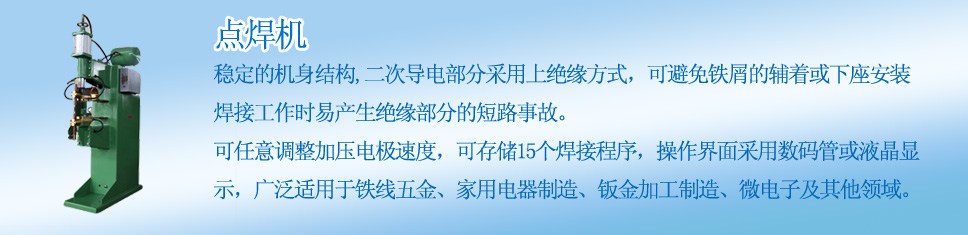
Ú¥ÖÚù¿þäèµ£║µÿ»þäèµÄÑÕñºÕ×ïÚÆóµ×äõÜgþÜäÕà│Úö?span style="text-decoration: underline;">Þ«æÍñçÒÇéõÏô(f¿┤)ÚÇéÕ║öþäèµÄÑõ©ìÕÉîÞºäµá╝þÜäÚÆóµØ┐´╝îõ┐ØÞ»üÚ½ÿÞ┤¿ÚçÅþÜäþäèµÄÑÕÀÑÞë║ÕQîµÅÉÚ½ÿþäèµÄѵòêþÄç´╝îÕ»╣þöÁ(sh¿┤)µ░öõ╝áÕ迵ĺÕêÂþ│╗¥lƒµùóÞªüµ▒éµ£ëÕ┐½ÚǃþÜäÕ迵ÇüÕôìÕ║öÕÅêÞªüµ▒éÕàÀÕñçÚ½ÿþ▓¥Õ║ªþÜä¢E¤xÇüÕ«Üõ¢ìµÇºÞâ¢ÒÇéÕ»╣õ║Äõ╝á¥lƒþÜäÕñºÕ×ïÚ¥ÖÚù¿þäèµÄÑ¥p╚Ø╗ƒÕQîÚù¿µ×Âõ©╗õ╝áÕè¿õ©ÇÞê¼Úççþö¿õ©ñõ©¬þï¼þ½ïþÜäÚǃÕ║ªÚù¡þÄ»µÄºÕêÂ¥p╚Ø╗ƒÕ»╣õ©ñõ¥ºÞ¢¿ÚüôþöÁ(sh¿┤)µ£║ÕÉÑÚ®▒Õè¿´╝îµÄºÕêÂþø©Õ»╣ÕñìµØéÕQîÚÜ¥õ╗ÑÕ«îÕà¿õ┐ØÞ»üÞë»ÕÑ¢þÜäÕÉÑÕQøµ¡ñÕñû´╝îÚççþö¿ÕñìµØéþÜäµ£║µó¯C╝áÕ迵û╣Õ╝ÅÚ®▒Õè¿þäèµ×¬Þ┐ø¥lÖõ©ÄÕ«Üõ¢ìÕQîþö▒õ║ĵ£║µó░ÞǪÕÉêþÜäÞ┐×µÄѵû╣Õ╝ÅÕ»╝Þç┤ÕàÂ¥lôµ×äÕñìµØéÕQîÕ»╣ÞúàÚàì¥_æÍ║ªÞªüµ▒éÚ½ÿ´╝îµö╣ÕÅÿþäèµÄÑÕÀÑÞë║Ú£ÇÞ░âµò┤µ£║µó░ÚøÂõÜgÕÅéµò░ÕQîÞ┐ÿÕ¡ÿÕ£¿µ£║µó░╝鿵ìƒÕÆîÕÖ¬Úƒø_ñº¢{ëþ╝║þé╣´╝îõ©ÑÚçìÕêÂþ║ªõ║åõ±öÕôüÞ┤¿ÚçÅÕÆîþöƒõ±öµòêþÄçþÜäÞ┐øõ©Çµ¡ÑµÅÉÚ½ÿÒÇ?/p>
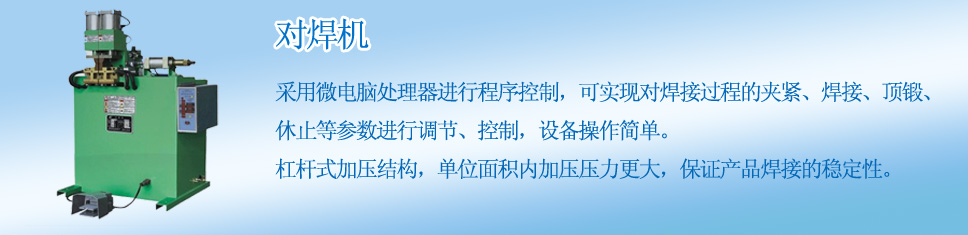
ÚÆêÕ»╣Ú¥ÖÚù¿þäèµ£║Õ»ÊÄ(gu¿®)ĺÕêÂþ│╗¥lƒµÅÉÕç║þÜäõ©Ñµá╝ÕÀÑÞë║Þªüµ▒éÕQîµ£¼µûçÚççþö?Þ¢┤µò░µÄºþ│╗¥lƒµ×äµêÉÚ½ÿ¥_æÍ║ªþÜäþäèµ×¬õ¢ì¥|«µÄºÕêË×╝øÕê®þö¿¢W╝Õ×ïÕ╝鵡Ñþö?sh¿┤)Õ迵£║þÜäÞ¢¼ÕÀ«þëÊ?gu¿®)Ǻ´╝îÚççþö¿õ©ÇÕÅ░ÕÅÿÚóæÞ░âÚǃÕÖ¿ÕQîõ╗ѵüÆÕ«Ü╝éüÚÇÜþÜäv/fÕ╝ÇþÄ»µÄºÕ굿íÕ╝ÅÕÉîµùëÖ®▒Õè¿õ©ñÕÅ░Þ¢¿ÚüôþöÁ(sh¿┤)µ£°Ö┐ÉÕè¿ÒÇéÕ£¿v/fÕ╝ÇþÄ»µÄºÕ굿íÕ╝Åõ©ïÕQîÕ¢ôõ©ñÕÅ░þöë|£║µë┐µïàþÜäÞ┤ƒÞ¢¢õ©ìÕÉîµùÂÞ¢¼ÕÀ«õ║ªõ©ìþø©ÕÉîÕQîÞ┤ƒÞ¢¢ÚçìþÜäþöÁ(sh¿┤)µ£°ÖØ{Úǃޥâõ¢ÄÒÇüÞ┤ƒÞ¢¢Þ¢╗þÜäþöÁ(sh¿┤)µ£°ÖØ{ÚǃޥâÚ½ÿ´╝øµ£¼µûçÕê®þö¿ÿqÖõ©ÇÞ¢¼ÕÀ«õ║ÆÞíÑÕăþÉåÕQîÕÚyÕªÖþÜäÞºúÕå│õ║åÞ¢¿ÚüôþöÁ(sh¿┤)µ£║ÕÉÑÚ®▒Õè¿þÜäµèǵ£»ÚÜ¥ÚóÿÒÇ?/p>
——µ▓êÚÿ│Õ¿üÕàïÕêøµû░þäèµÄÑÞ«æÍñçµ£ëÚÖÉÕà¼ÕÅ©
|